Mäh-Roboter mit Raspberry-Pi
Teil 2
Im vorigem Post hatte ich das Projekt vom Mäh-Roboter kurz umschrieben.
Während der Recherchen zu der Umsetzung hatte ich schon einige Dinge getestet:
Hier habe ich mal die Sensoren aufgelistet die ich derzeit für meine Tests benutze.
VL53L0x für die Abstands Messungen, das sind Time of Flight Sensoren. Alternativ könnte man auch die Ultraschall Sensoren HC-SR04 einsetzen. Ich habe meine finale Entscheidung noch nicht getroffen. Die hängt von den Testergebnissen der Probefahrten ab.
Dann für die optische Hinderniserkennung die PiCAM, das erscheint mir am einfachsten.
Für GPS, arbeite ich im Moment mit dem BN-880q. Hier geht aber eigentlich auch jedes andere Modul, ich arbeite immer gerne mit den Modulen, die ich schon mal eingesetzt habe.
Ein wenig komplexer ist die Arbeit mit dem Kompass und Gyro Modul MPU9250. Für dieses habe ich mich entschieden, da es neben dem Kompass eben auch einen Gyro- und Accelerator Sensor besitzt. Das ist von Vorteil, da man damit die Schräglage des Mäh-Roboters in die Kursberechnung einfließen lassen kann. Somit würde dann die Kurstreue steigen. Für die Strommessung und Akkuladung benutze ich ein INA Modul 3221. Die Herausforderung hier ist, dass die Maximal Spannung von 26 Volt nicht überschritten wird. Das ist bei kleinen Akkus wie z.b. 12 Volt o.ä. kein Problem, jedoch bei meinem großen Mäher mit einem 27.5V Akku, stehen bei Voll Ladung 29.4 Volt an. Dafür muss dann ein anders Modul her. Für mein erstes Modell verwende ich 12 Volt Motoren mit 40 Umdrehungen pro Minute. Die ziehen nicht viel Strom. Da reicht ein L298 Brücken Modul.
Dann stellte sich natürlich die Frage nach der Software. Da ich Python ganz gut kann, dachte ich mir dass ich die selber schreibe. Das ist denke ich auch nicht weiter schwierig, dauert aber lange. Erste Tests habe ich einfach mit ein paar Scripten realisiert um zu sehen ob Elektronik und Mechanik miteinander harmonieren. Natürlich ist die Absicht dann auch eine Weboberfläche zu haben. Welche Kriterien hier für mich wichtig sind, schreibe ich im nächsten Teil, und was ich derzeit auch erfolgreich einsetze. Im Moment widme ich mich mehr und mehr der Elektromechanik, also wie wird das ganze dann später verbaut. Einen ersten Verkabelungsplan habe ich gemeinsam mit einem PiMowBot begeisterten erstellt.

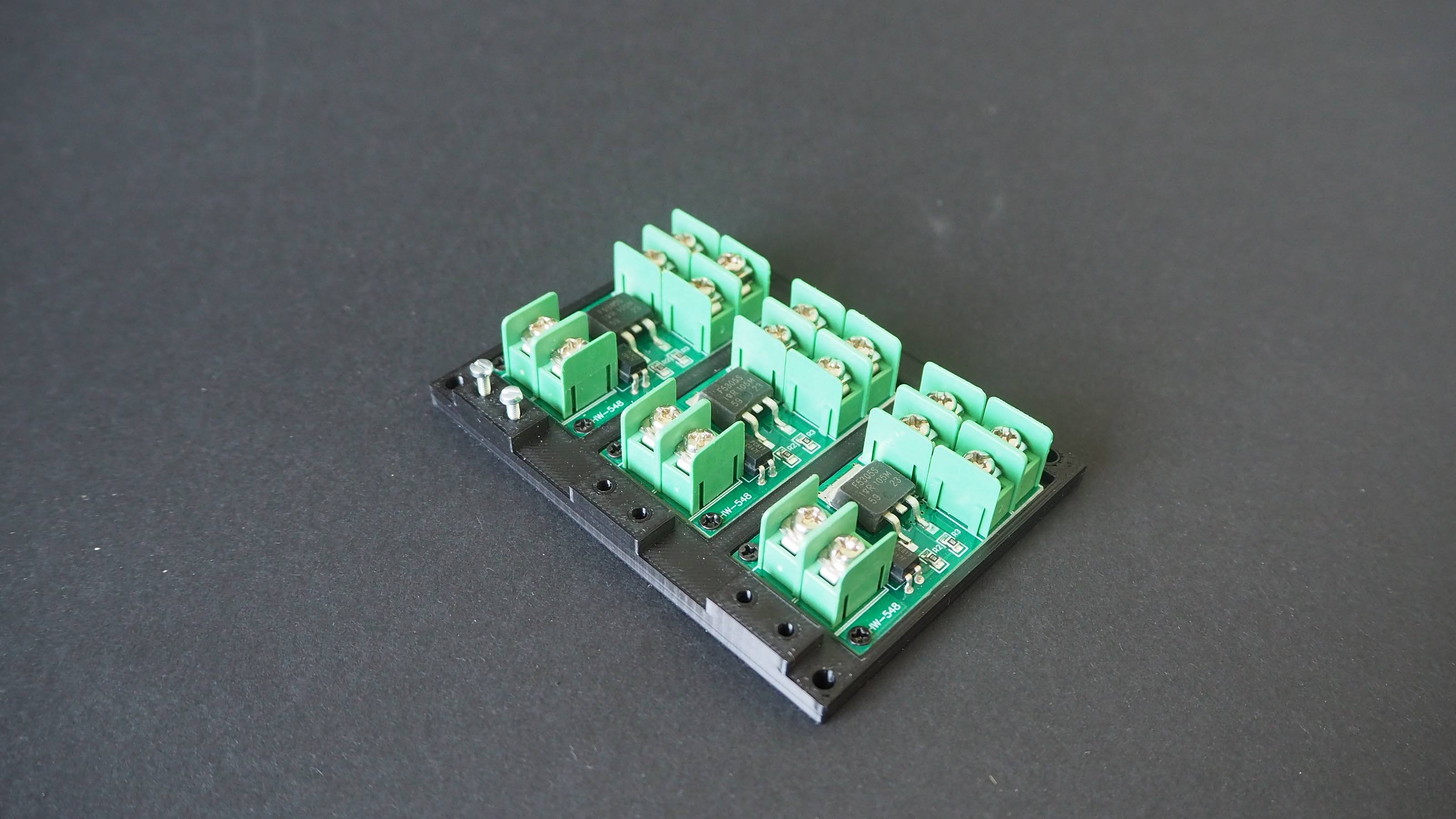
Und so nach und nach kommen auch die finalen 3d Drucke für die Komponenten hinzu. Eine Variante für die Relais ist z.B. auch das FET Modul HW548. Dazu habe ich eine Befestigungs Platte designed und gedruckt.
Mehr von dem Projekt steht dann im 3. Teil, da gehe ich dann auf den Raspberry pi und die Steuerungssoftware von TGD Consulting ein.
Also dran bleiben!
Keine Kommentare:
Kommentar veröffentlichen