Mittleres Frontteil und ToF Halterung
Nun ist es fast geschafft. Der MINIPiMowBot ist nahezu fertig. Es fehlt jetzt noch die Halterung für die Kamera und die Anbringung der Time of Flight Sensoren
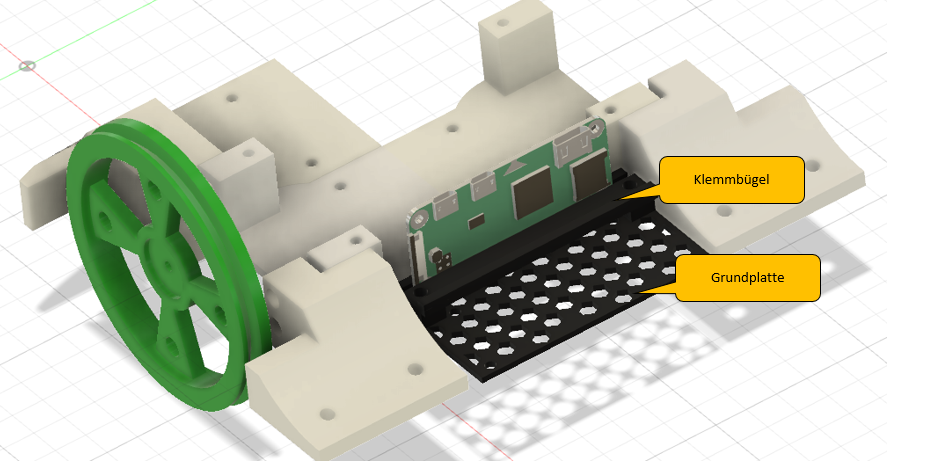
Bevor ich genau wußte wie ich die Kamera montieren wollte habe ich einige Aufnahmen mit der Kamera des Zeros gemacht. Wenn der MINIPiMowBot sich bewegt, muss er mit der Kamera das was sich vor ihm abspielt erfassen. Dazu habe ich die Kamera möglichst hoch aber auch einigermaßen schräg montiert. Im Moment verwende ich eine Neigung bei der Kamera von ca. 65°. Damit kann er ca. 1m weit vorausschauen, und hat einen Blindbereich direkt vor dem Modell von ca. 10cm. In der Praxis werde ich sehen, ob das für die Reaktionen auf grünem Grund ausreicht, oder ob die Kamera nicht ganz so schräg montiert werden muss. Hier ist das Mittelteil der Front abgebildet.



Im nächsten Post zu dem MINIPiMowBot, werde ich auf die eingesetzte SW auf dem Raspberry Pi Zero eingehen und einen kurzen Ausblick auf die Features geben die ich gerne mit dem MINIPiMowBot noch umsetzen möchte.