Rad-Spoiler und Pi Halterung
Ab heute geht es in meinem Blog zum MINIPiMowBot um den Aufbau der Konstruktionsteile die sich vor den Antriebsrädern befinden. Nachdem das Heck hier beschrieben wurde, sind heute die Rad Spoiler vorn und die Halterung des Pi Zero's an der Reihe.
Zur besseren Übersicht habe ich die Zeichnung wieder ein wenig vereinfacht. In grau sind die Servohalterungen dargestellt. Die Spoiler sind die Konstruktionen 1 und 2 Sie werden einfach vor die Servo-Motoren aufgeschraubt. Man kann auch gut erkennen wie die hintere Spitze der Konstruktion und die vordere äußere Kante des Spoilers das Antriebsrad dann schützen werden.
Direkt zwischen die beiden Spoiler 1 und 2 findet dann der Pi platz. Er steht hochkant und ist mit einem einfachen Klemmblock an der Headerleiste befestigt.
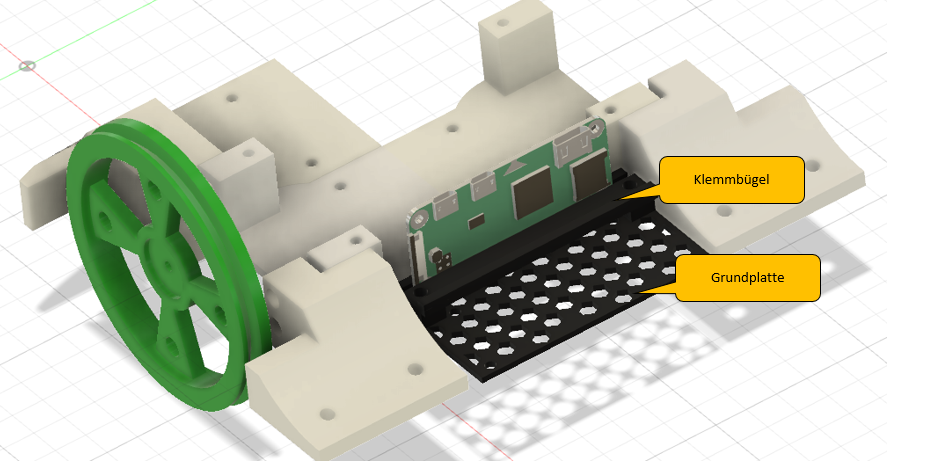
Der Klemmbügel wird einfach oberhalb der Headerleiste (hier nicht in der Zeichnung vorhanden) aufgesetzt und mit der Grundplatte festgeschraubt. Der Pi lässt sich dann mittels dieser Schrauben bei Bedarf einfach lösen. Bei mir saß die Konstruktion so stramm zwischen den beiden Spoilern, dass ich sie erst später mit der Grundplatte verschrauben musste.
Für die Anschlüsse der Sensoren habe ich mir schon vor einigen Monaten eine Expanderplatine ätzen lassen. Mit ihr ist es einfach den Pi mit Sensoren zu verbinden. Für die Belegung der Steck-Kontakte habe ich mir eine Standard Belegung definiert, die identisch mit den meisten i2c Entwicklungboards ist also VCC, GND, SCL, SDA.
Für die Anschlüsse der Sensoren habe ich mir schon vor einigen Monaten eine Expanderplatine ätzen lassen. Mit ihr ist es einfach den Pi mit Sensoren zu verbinden. Für die Belegung der Steck-Kontakte habe ich mir eine Standard Belegung definiert, die identisch mit den meisten i2c Entwicklungboards ist also VCC, GND, SCL, SDA.

Im nächsten Teil werde ich erklären wie ich die ToF Sensoren und die Kamera in den MINIPiMowBot integriert habe. Also dran bleiben!
Hi Ulli, cooles Expander Board... wo hast Du das fertigen lassen ? das hätte ich auch gerne... ich starte auch gerade das PiMowBot Projekt...Gruß Bernhard (aus Lüneburg)
AntwortenLöschen